The title may have given away the article contents, but feel free to read on pretending you don’t know the ending. Background: I work for the Raspberry Pi Foundation and I do a lot of Python stuff on Raspberry Pi. I presented this project recently in a lightning talk at EuroPython.
Motivation: space
If you didn’t already know, there are two Raspberry Pis on the International Space Station, as part of a programme we run called Astro Pi. They went up with British ESA astronaut Tim Peake in 2015. They’re both Pi 1 Model B+. They have Sense HATs (a particular sensor board we made especially for this mission) housed in space-grade aluminum cases. We run competitions for kids to write Python code on Raspberry Pis and Sense HATs in school (or in an emulator we provide) that gets run in space.
Anyway, my excellent colleague Dave, who runs the programme, asked me for help one day. They’d just finished a competition cycle, and some of the kids’ code had third-party library dependencies. He needed to be able to install new libraries on the Pis in space. The Pis are actually connected to the space station LAN, but not to the internet. So pip install isn’t an option. The only thing we can do is provide ESA with files and instructions.
He said “is there a way we can install these libraries offline?” I said “Yes, I think you can build wheels for the libraries, and install from the wheel files”. We tested it and it worked as expected. It took a long time, because some of the packages had their own dependency requirements. But since there was no way of excluding the libraries we already have available (without traversing the dependency tree and comparing manually), we just let it build them all. This included numpy. As I said, these are Pi 1s, so they’re ARMv6. We had to build on a Pi 1 to get an ARMv6 tagged wheel. It took 2 hours 30 minutes to build numpy alone. But we kept busy…
PyPI and Python wheels
When you install a package from PyPI (the Python Package Index) using pip, for example pip install numpy, it downloads the package and installs it on your system. If the package is implemented in Python, this is usually quite quick. However, if (like numpy), the package is implemented in C, then you have to compile the C code and build it before you can install it. pip handles this for you, but it can sometimes take a long time to build a package. A general solution to this exists: Python wheels.
Wheels are pre-built binaries package maintainers can use to distribute pre-built versions of their packages to save users having to build packages themselves. If a wheel has been provided by the maintainer, then pip downloads the wheel (the built distribution) instead of the source distribution (a tarball or zip), and this speeds up the installation process.
However, wheels for packages implemented in C are architecture-specific: a wheel will only work on the architecture on which it was complied: e.g. a wheel built on Windows x86 will not work on a Windows x86_64 machine. This does not apply to pure Python packages, which are tagged with architecture any. Not all package maintainers choose to distribute wheels at all, and those who do are likely to only provide wheels for architectures they have the means to build for. Maintainers of popular packages like numpy which take a long time to build from source tend to provide wheels for a variety of common architectures. For example, numpy distributes wheels for many combinations of:
- Windows x86
- Windows x86_64
- Mac x86
- Mac x86_64
- Linux x86
- Linux x86_64
for each version of Python they support (2.7, 3.4, 3.5 and 3.6). There are 22 wheels in total, plus the source zip.
When you build a wheel, the filename is made up of a number of parts:
- The package name
- The package version
- The Python tag (e.g.
cp34) - The ABI tag (e.g.
cp34m) - The platform tag (e.g.
linux_armv7l)
Hence: numpy-1.13.1-cp34-cp34m-linux_armv7l.whl
Read more in PEP-425.
The problem is:
- Building numpy on a Raspberry Pi 3 takes about 20 minutes
- Building numpy on a Raspberry Pi 1 takes about 2 hours 30 minutes
When you type pip install numpy, the flow goes like this:
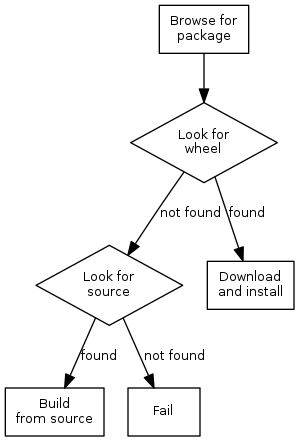
So, you’re on a Raspberry Pi. You type pip install numpy. It goes through the flow shown above. But there’s no wheel matching your architecture: you’re not manylinux_x86, manylinux_x86_64, or any of the others. You’re actually linux_armv7l. So PyPI says “Here’s the source. Build it yourself”.
What? This is an outrage! Don’t the maintainers of numpy care about Raspberry Pi users?
Well, even if they did, they can’t do anything about it because PyPI doesn’t allow uploading ARM wheels. There’s an architecture tag whitelist, and it’s not on the list.
What? This is an outrage! Don’t the maintainers of PyPI care about Raspberry Pi users?
Well, I’ll get to that.
What’s worse is when packages only provide wheels. That’s fine if you’re on an Intel machine, there’ll probably be a matching wheel for your architecture. But if you’re on ARM, there’s no source to fall back to, so you can’t even build it yourself. An example of this is tensorflow: 12 wheels, no source. There’s a project on GitHub where a member of the Pi community has documented how you build tensorflow, and he distributes the wheel.
Fine, I’ll build my own package repository…

So, enter piwheels.
After solving the one-time space problem for Dave, I considered whether a more permanent, automated solution was possible. Surely I can just build them all?
The command pip wheel numpy will build a wheel of numpy. If you do it on a Raspberry Pi 3, it will build a Raspberry Pi 3 compatible wheel you can distribute.
Well, if I did this, I’d want to do it in Python, not in a bash script. A quick google yields a stack overflow answer about using import pip.
Well, if I did this I’d need to access the list of all packages on PyPI. A quick google search yields a stack overflow answer about accessing a list of all packages on PyPI.
Well, if I did this I’d want to maintain a database of packages, and the output from build attempts. And so on…
piwheels v1
I started in April with a Pi 3 in my living room, running Raspbian Jessie Lite (a minimal server image). I read up on hosting a custom PyPI server and it turns out the minimum you can do is provide a directory listing, like Apache does by default. I built some wheels, and put them in /var/www/html/{package}/ and tested installing them, telling pip to install from the IP address of the Pi. Installing numpy took just a few seconds!
I created a little Python project which could build a wheel from a given package name, store the build success and the output data in a postgres database, and move it to the right place in the web directory. I created a packages table and before long I was performing a full build run, iterating over a list of packages, and storing the output in a builds table. At the time there were 106,000 packages on PyPI.
I added some features, I hit some snags, but things were going well. I started adding up the cumulative build time, and I estimated it would take 10 days to complete the run. I thought “that’s not bad”, and kept it going. Occasionally the build would get stuck, or something would go wrong, and I’d lose some build time, but I would patch and keep moving. I created a web index which was populated with some build statistics so I could keep an eye on it. I even built individual package pages with the build output so you could browse it and see why things failed.
My estimate was correct: it took 237 hours (just under 10 days) in total (though a few weeks in real time, with it breaking on occasion). I got a 76% success rate – seeing a range of reasons for failure: missing dependencies, Python 2 only, and so on.
I was only building the latest version of every package, and so I knew I would need to keep up with new releases, but that seemed feasible. Then I realised that version numbers often differed between what PyPI had and what the output wheel file contained, and had some issues around working out which packages needed updating. And then it occurred to be that rather than only hosting the latest version of every package, I probably needed every version of every package.
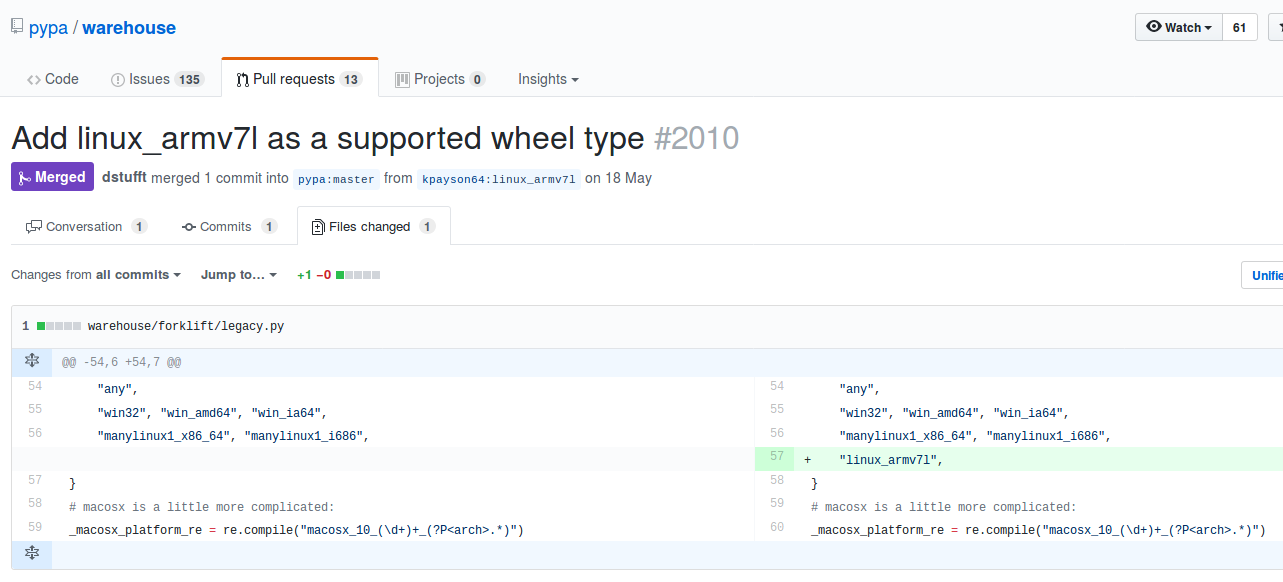
I left the project sitting for a while, took a break and considered what to do next. Meanwhile, some Google developers working on packaging some Python libraries for the Google assistant API for the Google AIY kit for the Pi got in touch to say they’d come across piwheels and thought it was great. They asked how I was going to market it to maintainers to upload ARM wheels to PyPI. I said “I’m not – because they can’t upload ARM wheels – PyPI doesn’t allow it”. So one of them filed an issue on warehouse (the next generation PyPI project) and Donald Stufft accepted the suggestion and made the change to allow ARMv6 and ARMv7 wheels. Thanks both!
This means you can now upload ARM wheels to PyPI, if you set the repository URL in your ~/.pypirc file to:
repository=https://upload.pypi.io/legacy/
Yay! But that doesn’t make piwheels redundant. Most maintainers won’t bother uploading ARM wheels. piwheels aims to build everything.
piwheels v2
Raspberry Pi’s web hosting provider, Mythic Beasts, are local to Cambridge, and its directors and staff can often be found working from nearby pubs. I happened to notice Pete, one of the company directors, was in the Haymakers one evening, and I talked him through my project. Mythic Beasts provide Raspberry Pi 3 hosting: they have a rack of Pis in their London data centre and they rent them out like regular servers. He was thinking what I was thinking: let’s put this in the cloud. There is no Raspberry Pi cloud, just other people’s Raspberry Pis. He gave me access to one. I was very impressed with the ease of use: it was easy to order, and I was shelled into it within minutes.
I started prepping it to be a piwheels server, and did some work on refactoring the code, writing some documentation of the configuration and writing a test suite. I wanted v2 to be a nicer open-source project people could easily contribute to. I wanted it to be easy to reconstruct the whole thing on a Pi, and make it possible for people to run a version of it on their PC so they could play around, contribute something and send a pull request with confidence. I spent lots of time not building anything, just casually working on the codebase.
I provisioned the cloud Pi, and ran a script to update the database with a full list of packages, and introduced a new table for package versions, populating that with references to every version of every package. This took a day or two to complete, and I discovered that there were around 750,000 package versions on PyPI. At the rate I was building before, that would take around 70 days – which isn’t terrible, but I wanted to be finished quicker than that. In the first few days I noticed builds were taking even longer than I expected – some of the exact same packages I had built on my Pi at home were now building slower than before. I asked Pete about it and he said it would be due to the fact the cloud Pis are netbooted, rather than run from an SD card, and it will be suffering from IO bandwidth. So at this rate I estimated 100 days.
I went to EuroPython, and left it running the whole time. It was going very slow, less than 1% a day as expected. I chatted with a few people about the project, and they seemed interested in the idea. I gave a lightning talk, and had a couple of people express interest in it. Both suggested cross-compiling. I had my reservations about this, as it’s not all about speed: it’s about reliability and compatibility. I know these packages, built on a Pi 3 will work on a Pi 3. And of course, I want to eat my own dog food.
Then I met Pete in the Devonshire (another local pub), and proposed a solution: I said “I’ve done the maths, and it will take 100 Pi days. With one Pi it will take 100 days. With 2 Pis it will take 50 days, with 10 Pis: 10 days. Can I have access to more Pis, for just a week or two?”. He said that was fine – and kindly gave me enough credits on my account to fire Pis up at will. I started with a second Pi, provisioned it like the first, but without the web server and the database. Instead, I let it connect to the database on the first Pi. Before long, they were both building simultaneously. I added a third Pi, and started making a provisioning script. I got that running too, and then took it up to five. “I’ll be done in no time”, I thought. But the output I was getting was… about the same as one Pi.
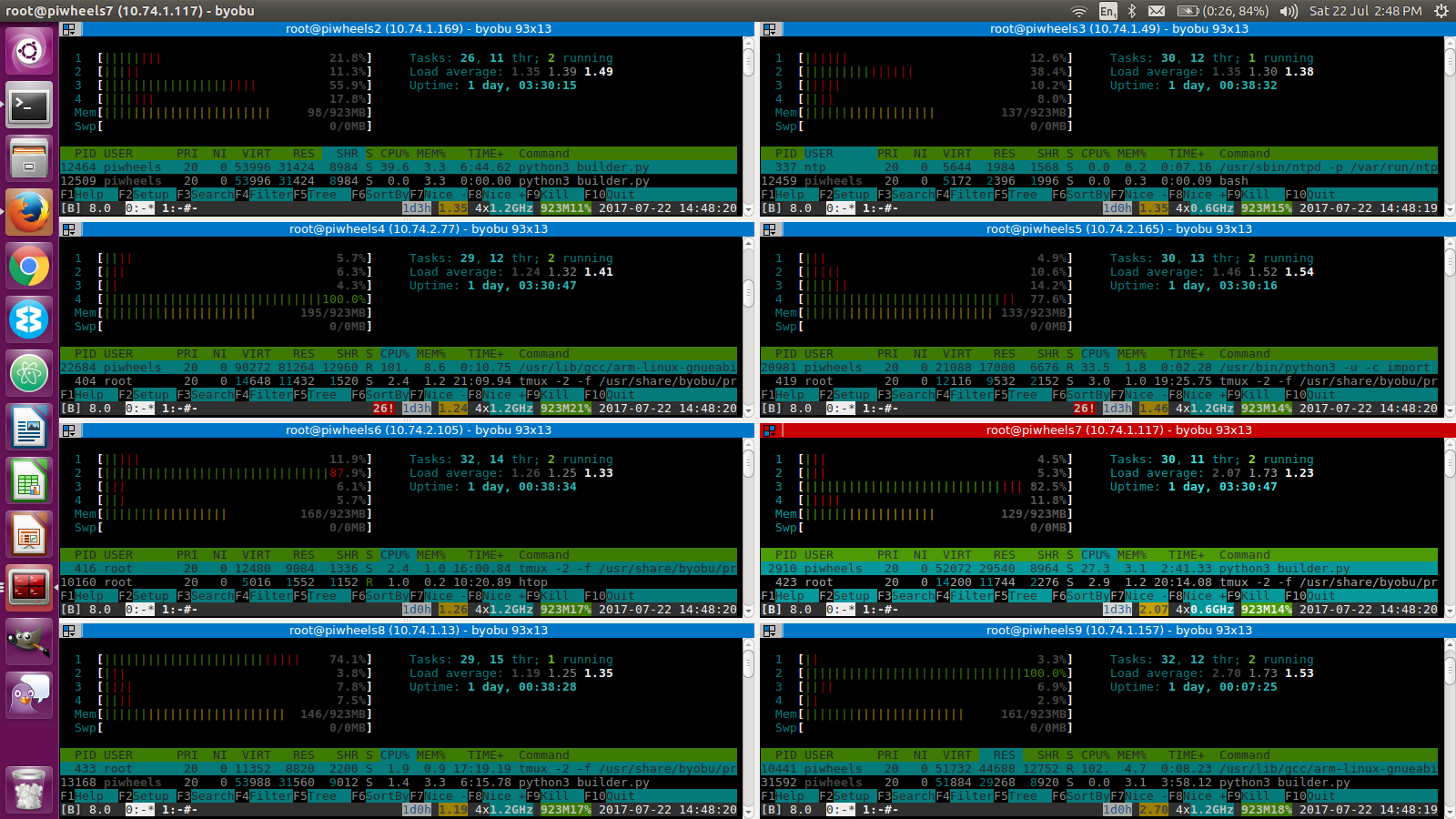
Using terminator to monitor all the Pis at once
I analysed what was going on and realised this didn’t scale (as is). The Pis were all querying the database for which package to build next, and that query was taking a long time. My friend Dave (not the space one, a different one) chipped in with some query optimisations, and then created a simple queuing system with zeromq. I deployed this and it worked like magic: five Pis building in harmony, each as fast as the first one was originally. We ended up retiring the original Pi from building duties and made it the “master”. I quickly doubled my count to ten Pis, and again to twenty. Provisioning was faster as they didn’t need DB credentials and adding to master’s iptables any more.
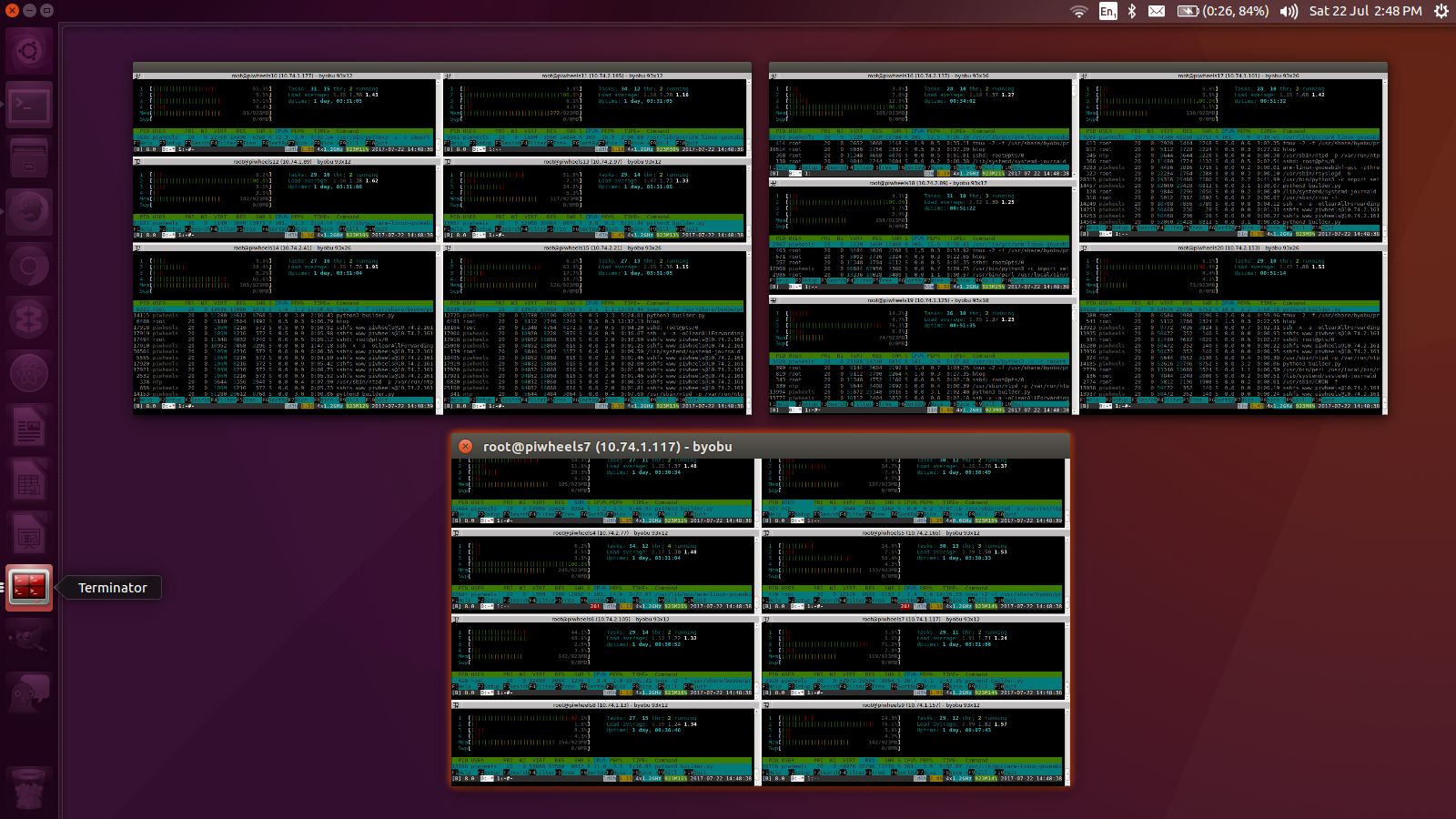
ALL the cloud Pis
I completed about 12% in the next 24 hours – it was just a matter of time now! I tweaked the web index stats page and excitedly monitored the countdown. Today, the build completed its full run! It took about 150 days of build time in total, which is more that anticipated due to the occasional duplicates from the different Pis.
You can now install packages from the piwheels server using:
sudo pip3 install <package> -i https://www.piwheels.hostedpi.com/simple
or as an additional index:
sudo pip3 install <package> --extra-index-url https://www.piwheels.hostedpi.com/simple
The results
- Total packages: 113, 649
- Package versions: 752, 817
- Build success rate: 76%
- Total cumulative time spent building: 156 days, 18 hours (including duplicates)
- In real time this was 26 days:
- 16 days with 1 Pi building
- 10 days with up to 19 Pis building
- In real time this was 26 days:
- Total disk usage from wheels: 250GB
Some graphs Dave generated from the build data:
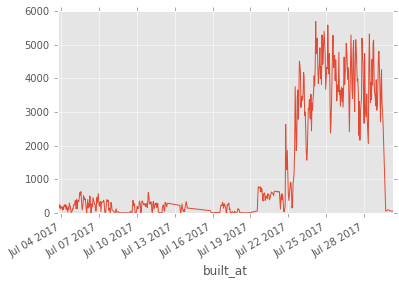
Builds over time
You can see the first two weeks of build time with a single Pi, then it quickly ramped up as we introduced more Pis.
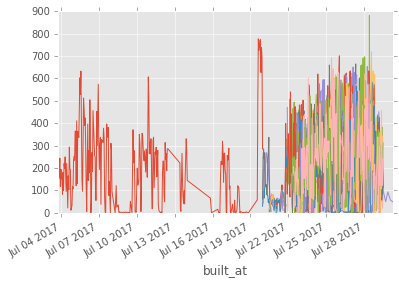
Builds per Pi over time
Reasons for failure: some releases are registered but nothing is uploaded, so there’s nothing to build. Then there are a fraction of import errors, synax errors and so on:
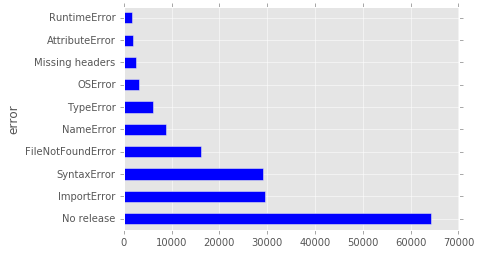
Reasons for failure
Tags
Python tag:
- py3: 601, 405
- py2.py3: 112, 534
- cp34: 15, 693
- others redacted
ABI tag:
- none: 715, 081
- cp34m: 15, 548
- noabi: 1 (oddly, this was the wheel package)
Platform tag:
- any: 715, 062
- linux_armv7l: 15, 561
- manylinux_armv7l: 6
- noarch: 1 (again, wheel)
See more analysis in Dave’s Jupyter notebook.
People do stupid things
Blindly running other people’s software can be risky. Even though I’m just running their setup.py to build it, not actually installing their package, funny things can happen:
- Random files created in my home directory
- Random stuff appended to my
.bashrcfile - Some people run
git clonein theirsetup.py- Seriously. The number of times I checked on a builder to find it waiting at a github.com username prompt…
- Inadvertently importing numpy, even though they don’t need to, and failing.
- For example, in
setup.py:from mypackage import __version - This then imports their main library file, just to get the version number. The file contains
import numpy, because their library uses it. However, I don’t need numpy in order to build the package. There’s a difference between build dependencies and user dependencies. Your package’s build script shouldn’t have unnecessary dependencies, and fall over when something like numpy (which isn’t used) isn’t installed.
- For example, in
What’s next?
- Continue to keep up with new releases by maintaining a small number of builders
- Add SSL to web domain (done!)
- Create individual package pages with build output
- Install key dependencies and rebuild failures, based on analysis
- Rebuild all packages tagged with
py34for Python 3.5, 3.6 and maybe 2.7. - Ensure ARMv6 wheels are available too
- You can just rename an ARMv7 wheel and it’ll work on ARMv6. I’ll present a duplicate of the file with the right platform tag where necessary, and that should work fine. Note that this is not required for Pure Python packages as they are tagged with
anyas the platform.
- You can just rename an ARMv7 wheel and it’ll work on ARMv6. I’ll present a duplicate of the file with the right platform tag where necessary, and that should work fine. Note that this is not required for Pure Python packages as they are tagged with
- Add the piwheels URL to pip’s config in Raspbian so that everyone gets wheels for free (zero marketing required)
Thanks
Huge thanks to Mythic Beasts for providing me with the cloud Pis.
Thanks also to Dave Jones for his contributions.
Links
- The piwheels server: www.piwheels.hostedpi.com
- piwheels on GitHub: github.com/bennuttall/piwheels
- Analysis: github.com/waveform80/piwheels-analysis
- Mythic Beasts Raspberry Pi 3 servers: mythic-beasts.com/order/rpi
- Follow me on Twitter: @ben_nuttall
Update (9 August): A new build run is currently in progress, so some previously built packages may be unavailable. I will post an update when the build run is complete.